The Intelligent Robotics Research Group
The Department's first robot was a donation in 1977 – a 360kg steel box of electric motors with a one metre arm and pneumatic gripper – obtained from British United Shoe Machinery in Leicester. This was combined with a Phillips video camera from the Post Office.
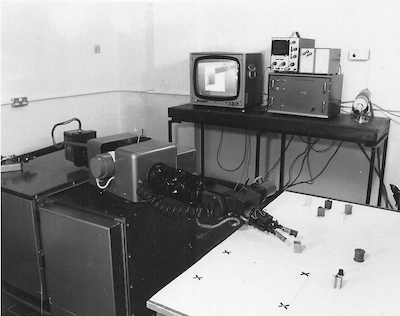
The camera, being based on a Vidicon tube and giving TV format output, came with a large rack of hand wired transistors that integrated and converted the analogue line-scan images into digital pixels for connection to a computer. Despite the extremely low resolution of this system (21 x 25 very large pixels) some useful results on component recognition were produced by a research MSc student in 1979.
The imminent delivery of this equipment caused an accommodation crisis. Computer Science has always had a long-running problem of inadequate accommodation. Requests for more space usually resulted only in offers of offices and so these were regularly converted into teaching and research laboratories. Some roomy female toilets on the ground floor of the Llandinam building were converted into two linked rooms with the robot in one half and the Department's PDP 11/40 computer in the other.
The Department's first research grant in 1982 established the Robotics Research Group and brought in the latest professional-level equipment, in this case an ACME loan-pool Unimation Puma robot. David Barnes and Nigel Hardy were appointed as the department's first full-time research staff. This project was in collaboration with a computer vision company, British Robotic Systems Ltd, and we worked on manufacturing assembly tasks, including rear hub gear-boxes for Raleigh bicycles, see the article about Sturmey-Archer. Another of the outputs was a novel high-resolution tactile sensing finger.
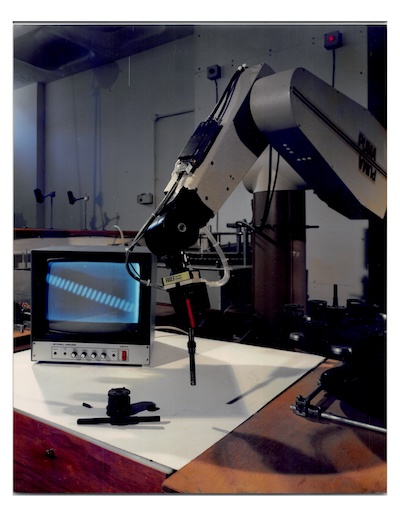
The main AI methods used at this time were expert systems and knowledge bases. Our project objective was to reproduce some of the expertise seen in human error recovery reasoning and apply this to error detection and automated recovery.
Stimulated by the ambitious Japanese fifth-generation computer systems program, in the 1980s the West began to invest serious funding into the applications of computers in manufacturing and industry. In the UK, the government initiated two big programs: Alvey (named after John Alvey from British Telecom), which had four divisions, two of which were Artificial Intelligence (AI) and Software Engineering (SE); and ACME, a Directorate of SERC that specifically covered manufacturing industries. European funding was also available, for example from the EEC ESPRIT programme. Fortunately, our main interests were in AI and SE and these initiatives provided most of the funding for our early research development. Also, our work became better known through the regular ACME and Alvey conferences for grant-holders.
Collaboration with industrial partners was a mandatory requirement of all these funding agencies; there were no university-only projects. Despite the department's geographic location, many long-lasting and productive collaborations were established, across the UK and internationally, and this involvement remains a major feature in both teaching and research.
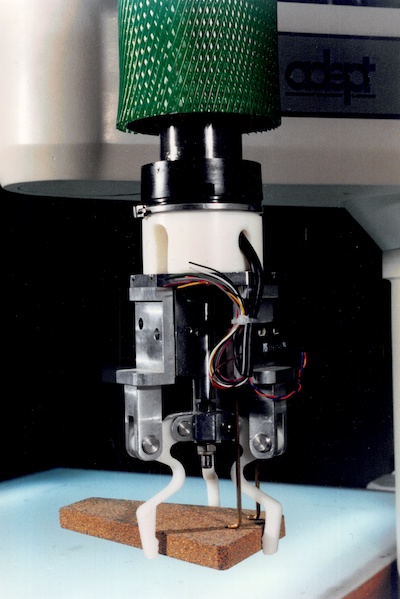
The second robotics grant in 1985 was a large project in collaboration with Thorn EMI Research Centre. This provided a high precision AdeptOne robot from California, powerful computers from the new and upcoming company Sun Microsystems, and a Symbolics machine (designed from the hardware up as a Lisp processor).


Our research focus was on exploring how AI techniques could make robots more flexible and intelligent. In 1990 the name changed to the "Artificial Intelligence and Robotics Research Group" to reflect the growing involvement with AI. We found our work on reasoning about mechanical components could be extended into reasoning about electrical systems. This became a very productive area because our qualitative algorithms could analyse circuit design problems without solving all the complex electrical equations previously necessary to obtain precise voltage and current values. Through two more grants and working with Jaguar cars, later to become part of Ford, we developed diagnostic and analysis systems that located faults in car electrical systems. This line of research was then championed by Chris Price who also established (in 1997) a university supported company, FirstEarth, to produce commercial fault analysis software. For more see FirstEarth. Eventually, qualitative reasoning and related methods developed as a separate research group, the Model-Based Systems Group, now known as the Advanced Reasoning Group (see the ARG entry under Research for details).
In 1993 a second Adept robot was obtained from a collaborator and this provoked another accommodation crisis. We had to threaten to refuse delivery of the robot, resulting in the lab being extended by knocking through into a staff room and a seminar room, forming the area now used as a student workstation room (B57).
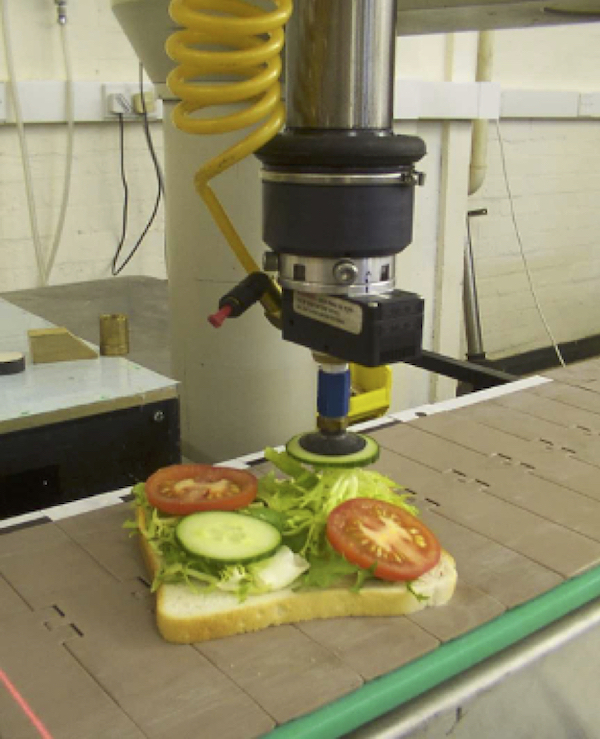
The succession of grants and external funding improved the research environment considerably, in particular, we built up a network of Sun SPARC machines. From industrial manufacturing problems with solid components of known properties we moved on towards the assembly of items that could be flexible, of varying sizes, and uncertain shape - food assembly. With partners Unilever, we packed (model) frozen fish products into boxes.

In collaboration with Solway Foods Limited and Rutland Handling we were developing sensing and control techniques that permitted food assembly tasks to be specified to robotic systems simply by showing examples of the results required. This project, which was funded by the Agri-Food Directorate of BBSRC, produced a demonstrator system that was able to learn, from hand prepared examples, the positions and orientations at which the various components need to be placed in the assembly of snack food products such as sandwiches and pizzas. The system had to adapt to the large degree of shape and size variation between different examples of the same component type, which is an inevitable feature of food products.
The Higher Education Funding Council for Wales set up a series of Centres of Expertise in 1993 and we won funding for the Centre for Intelligent Systems (CIS). This three-year grant provided teaching replacements for two deputy directors a computer officer, and several research students. The remit of the CIS was to promote and disseminate advanced AI software across SMEs in Wales. This activity was continued and expanded through CASIS, the Centre for Advanced Software and Intelligent Systems for another six years. In order to cover the whole of Wales we worked jointly with Computer Science in Cardiff. We employed a sales manager and support staff (including Richard Terrace, David Craddock, Peter Simmonds, Rob Wyn Jones, and Andy Starr), visited many SMEs, and worked for companies like Halen Mon, Broadsword, Invertek Drives, and Pack-IT. For more on technology transfer see the article CIS and CASIS .
A different line of research concerned the development of new learning algorithms based on the idea of the human immune system. This work was started by John Hunt, Mark Neal, and Jon Timmis (now Professor and Deputy Vice-Chancellor at the University of Sunderland). Other AI research topics include communication systems in swarms of robots (Myra Wilson and Alexandros Giagkos).
Space robotics was a new research area in the 2000s and this was championed by David Barnes through a series of grants from 2006 onwards until his tragic death in 2014. David returned to the department in 2000 and won funding from PPARC and the European Space Agency that set up the Mars terrain laboratory, for testing rovers and other planetary robots (located in the Physics building),
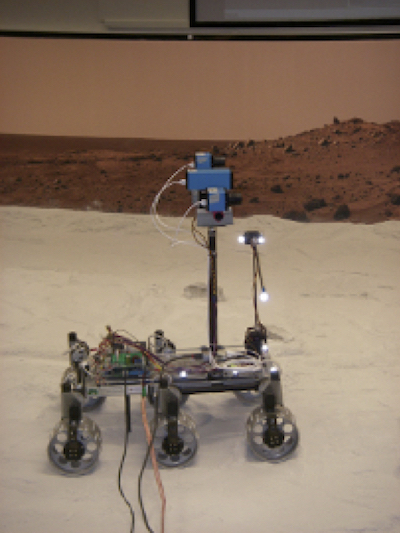
The space team had a major involvement in the Beagle 2 Mars lander – launched in 2003 and finally located on Mars in 2014. This has led on to further projects on the ExoMars mission and includes the design and production of tools for colour calibration of the cameras, fiducial markers for the geometric calibration of the camera head, and image calibration software and sensor systems for the Mars Terrain Simulator based at ALTEC in Italy.

Alongside this, a 3D Virtual Reality model of the rover has been developed enabling scientists to view what the rover will be able to see through its various cameras. A full-scale Mars rover is currently being built in-house for research, alongside another full-scale model named after Dave Barnes for outreach use.
David was also instrumental in, setting up a new general robotics lab, known as the Intelligent Systems Laboratory (ISL), in 2002/3. Mark Neal and Fred Labrosse were also very involved in this and other robot facilities. The ISL was fitted out with four safety cages, a large workstation area and an arena for mobile robot experiments.

This large space, previously a storage stack for the earth sciences sub-library, has an access lift and limited daylight thus providing controllable lighting for the Vicon motion tracking system and other vision equipment. The Department also acquired its first commercial mobile platforms: four Pioneer 2DXe’s and one Pioneer 2AT.

With a further move away from manufacturing towards outdoors and the natural world, the group adopted the slogan "Unstructured Environments" and in the 2000s began work on Field Robotics, that is, robots on land, sea and air. Mark Neal and Fred Labrosse brought in robot yachts, full size rovers and lots of mobiles. The first large rover, named Idris, and a robot sailing boat, named BeagleB, both from Robosoft in France, were acquired in early 2007, creating more space issues.


For their first few years these two robots lived in stock trailers on University car parks with researchers spending a lot of time in these trailers, summer and winter. This was later improved by gaining access to a workshop on the Llanbadarn campus in 2009 and subsequently, in 2015, made even better by the construction of a dedicated, purpose-built workshop on the Penglais campus near Physics. This is called: The Field and Applied Robotics Lab (aka The Robotics Workshop, aka The Shed).
Colin Sauze was heavily involved in developing various bespoke robot sailing boats and these were used for research into Artificial Neuro-Endocrine systems which looked at how artificial “hormones” could improve a robot’s ability to adapt its behaviour to changing environmental conditions. In 2005 Mark Neal along with Yves Briere from ISAE in Toulouse, France came up with the crazy plan to race some of these boats across the Atlantic. This became known as the Microtransat Challenge and a small warm up race was run in Aberystwyth in 2007. The very first attempt at this was made in 2010 by a team from Aberystwyth using a converted dinghy called Pinta.

Unfortunately, Pinta only lasted about two weeks through several Atlantic storms. But did at least clear some much needed lab space. Actually, it was great fun following Pinta's progress each day from plots of her course by GPS signal. Ideal for media attention too. Since then 31 other boats have tried and only one has succeeded.
For more photos and details see the article about robot boats and other field robots.
The fleet of vehicles was further expanded with three G-Wiz electric cars and two amphibious 6 wheel Argocats. These were converted into robotic platforms capable of moving large payloads such as 3D laser scanners and snow penetrometers. These were used for survey services such as laser scanning in quarries in North Wales, lakes in Scotland, and rivers in New Zealand. At this time an Argocat could be frequently seen on the fields behind the Llanbadarn workshop, mostly tearing up the grass and running over the occasional hedge.
In June 2009, the group held a summer training event for postgraduate students. The Aberystwyth Intelligent Robotics Summer School, or AIR, was a week of lectures and project work and students came from across Europe.

The group has always used vision sensing with computer-based vision processing systems and in 2004, with the appointment of Reyer Zwiggelaar, the group's research interests in computer vision moved out of robotics and into the new Vision, Graphics and Visualisation Group (see the VGVG entry under Research for details).
In the 2000s, new equipment in the ISL included twin AdeptSix arms mounted on a massive steel frame to eliminate vibrations, a Schunk seven-joint arm with a three-finger tactile gripper, and a fast scanning binocular camera system. The research focus, funded through a number of EPSRC and EC Framework grants, now concerned fundamental questions regarding the learning of hand-eye coordination and general object manipulation. These projects involved collaboration with psychologists and other brain scientists so that the models developed may better relate to human performance.
In 2010 we obtained an iCub robot through a European project, one of 4 in the UK. The European Commission funded the iCub humanoid robots as research tools for robot learning. iCubs are modelled on the anatomy of an infant of around 3 years of age and are fully motorised and sensor laden. The iCub was our first humanoid robot and facilitated work on modelling early infant behaviour in order to build new robot learning algorithms.
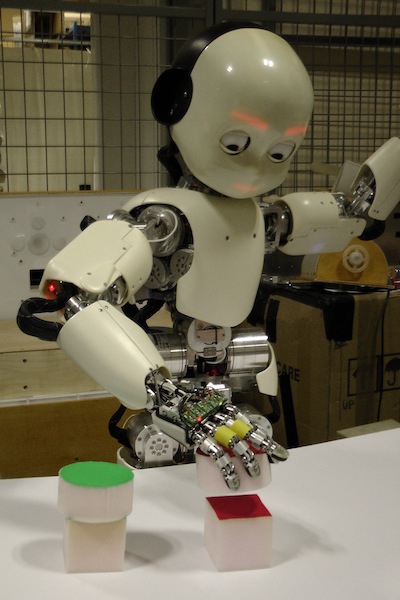
Psychological research has provided much data on early infant learning and this inspires the design and exploration of novel robot learning algorithms. A recent project continued this work and demonstrated the iCub learning in real time and without any databases or prior training, see some videos of iCub learning
A newly started area of research explores the automation of wheelchairs, with a view of helping users driving through difficult places such as doorways, but also for longer range navigation (“take me to the kitchen”). Increasingly, research is moving toward health monitoring, assisting stroke rehabilitation and assisting independent living, with a new Smart Home lab aiming to open in 2022.
Alongside research, the group has increasingly been involved with promoting robotics both to the general public and in schools. As well as regular Open Days and Science Fairs we ran a Coding Club as part of Technocamps (2011-2014), and an afterschool Aber Robotics Club (ARC) was established. The summer Beach-Lab exhibiting the work of the members became a prominent feature at the bandstand on the promenade each year.

In 2018, this was expanded to a full week-long series of events giving talks and workshops to the general public on robotics research taking place in Aberystwyth.